Dijkstra's Algorithm
Quick Recap on Dijkstra's:
- no negative-weight edges
- weighted version of breadth-first-search
- instead of FIFO queue, use priority queue
- keys are shortest-path weights
- two sets of vertices
- vertices whose final shortest-path weights are already found
- priority queue = vertices still in the queue, those we still need to evaluate their shortest path
- greedy-choice: at each step we choose the light edge
Code#
def init_single_source(vertices, source_node):
for v in vertices:
d[v] = inf
p[v] = nil
d[s] = 0
def relax(u, v, w):
if d[v] > d[u] + w(u, v):
d[v] = d[u] + w(u, v)
p[v] = u
def dijkstra(V, E, w, s):
init_single_source(V, s):
S = set() # init empty
Q = priority_queue(V)
while Q is not empty:
u = extract_min(Q)
S = S.add(u)
for v in adj_list[u]:
relax(u, v, w)Mathematical Context For Path Properties#
First, let's cover the working parts & properties:
Triangle Inequality#
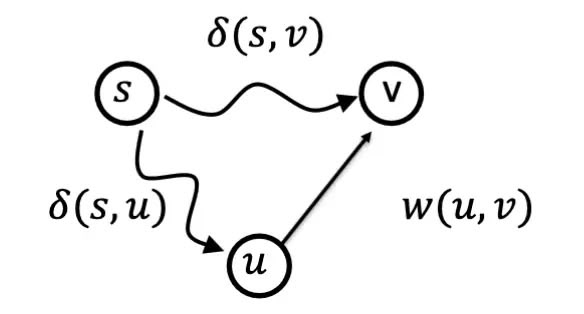
The Triangle Inequality states that for all , we have .
Proof#
- we have a path , as well as a shortest path
- the weight of the shortest path is any path
- let us say that the path
- this means if we use the shortest path and direct edge , then the weight along
Upper Bound Property#
The Upper Bound Property states that we always have . Once , it never changes.
Proof by Contradiction on Inequality#
- let's assume this starts initially true
- then, assume
- this is the first instance of it happening
We know that this can't have happened at initialization, because init_single_source() sets all , therefore this must have happened at some point during the algorithm's run time.
Let be the vertex that causes to change, since in order for us to have altered , relax(u, v, w) must have been called.
Within relax(u, v, w), is altered only if:
d[v] > d[u] + w(u,v)evaluates to true.- if so,
d[v] = d[u] + w(u, v)is the change made to
Recall our initial assumption, we have:
- via Triangle Inequality,
- , since was the first vertex where its estimate was less than the shortest path, meaning:
- this results in the full inequality:
However, this is impossible, since relax(u, v, w) set , and nothing can be equal and be explicitly less than something else simultaneously.
Thus, we have proved .
No-Path Property#
The No-Path Property states that if , then will always equal
Proof#
- via the Upper Bound Property,
- this means
Convergence Property#
The Convergence Property states that if:
- we have a path – (it is a shortest path)
- we call
relax(u, v, w),
then afterward.
Proof#
We relax within this code:
if d[v] > d[u] + w(u, v):
d[v] = d[u] + w(u, v)
p[v] = uAfter this code, , because when entering relax(u, v, w):
- if was – we would bypass the if-condition, and nothing happens
- if was , then it is set
The only two cases resulting in .
We can take the RHS and simplify it, as we have defined :
Since we defined to be a shortest path, meaning:
Finally, by the Upper Bound Property, we know that . This means we must have .
Path Relaxation Property#
Let be a shortest path from to . Relaxing these edges, in order, will ensure that . (The shortest path estimate at is the correct one).
Proof by Induction#
We will show via induction on the number of vertices that after the edge is relaxed.
Base Case: , and .
At initialization in init_single_source(), we set .
Inductive Step: Assume .
As we relax edge , note that we have met the pre-conditions for the Convergence Property:
- we have a shortest path
- by optimal substructure, the path must also be a shortest path
- we have
- we are now calling
relaxon
hence, converges to be and never changes.
We have proved by induction that if we relax the edges in order.
Dijkstra's Proof#
via Loop Invariant#
We will prove via a Loop Invariant that Dijkstra's Algorithm is correct.
def dijkstra(V, E, w, s):
init_single_source(V, s):
S = set() # init empty
Q = priority_queue(V)
while Q is not empty:
u = extract_min(Q)
S.add(u)
for v in adj_list[u]:
relax(u, v, w)Loop Invariant: At the end of each iteration of the while loop,
Initialization#
At initialization, is an empty set, and so the loop invariant holds as a by-product of having no yet.
Maintenance#
Show that when is added to in each iteration.
We will prove the maintenance property through contradiction:
Assume that for the first time, after an iteration on some vertex , we have added to , and .
What do we know?
For starters, we know that , as . This means that and when is added.
We also know, by the No-Path Property, there exists some path . Otherwise, the property states that:
which contradicts our assumption that .
Since there exists a path , there must exist a shortest path, , from .
Allow us to decompose into , such that , , and edge is the edge crossing the two sets .
Claim: when is added to
Proof:
- by optimal substructure, any subpath within , such as , is a shortest path as well
- we called
relaxon edge at the time of adding to- so by the Convergence Property,
This means that if , we have already reached a contradiction, as our initial assumption was:
and we have just proved that the estimate is the correct delta, and the proof is finished.
However, what if ? Can we still reach a contradiction?
Once again, we know that there exists a shortest path from via the No-Path Property, and that any subpath along is also a shortest path by optimal substructure. This implies a chain of logic:
- is a shortest path
- by our Claim,
- since there are no non-negative edge weights, a shortest path must be at least as long as , meaning:
-
- this is because we must pass to get to
- by the Upper Bound Property
Putting this all together:
Lastly, we know that:
- we are in the iteration of the while loop where we choose
- stores a vertex as a key-value pair
{ v : d[v] } extract_min(Q)chooses to extract the vertexvifd[v]is minimum across all estimates it finds inQ- both and were in when we chose
This means in order for to have been chosen, . We can conclude:
The estimate must be equal to the estimate if it is both and . This, again, contradicts our initial assumption that as , and by our initial Claim.
Termination#
At the end of the while loop, (which was equal to ) is now the . At each iteration, we added the current vertex to , meaning that now, . This implies that:
The loop variant has been shown to hold across initialization, maintenance, and termination, thus proving Dijkstra's Algorithm.